Publications
Journals

Estimation of Tire Forces and Torques Via Nonlinear Suspension Models and Optimal Control
ASME Journal of Computational and Nonlinear Dynamics, 2025

Robust and Sample-Efficient Estimation of Vehicle Lateral Velocity Using Neural Networks With Explainable Structure Informed by Kinematic Principles
IEEE Transactions on Intelligent Transportation Systems, 2023

Conferences

Real-time Optimal Control of an Autonomous RC Car with Minimum-Time Maneuvers and a Novel Kineto-Dynamical Model
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
Workshops
Real-time Autonomous Parking in Unstructured Scenarios with an Indirect Optimal Control Approach
Behavior-Driven Autonomous Driving in Unstructured Environments (BADUE), IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Poster sessions
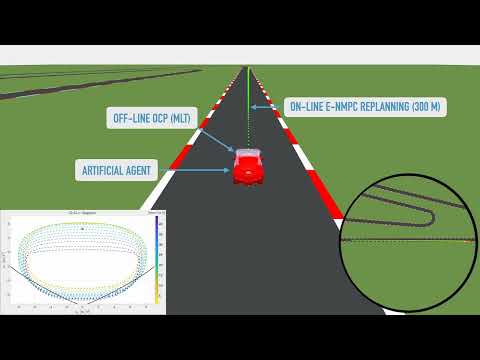
A Physics-Driven Framework for Online Minimum-Time Vehicle Motion Planning and Control
Industrial Engineering Day, University of Trento, 2023

Motion Primitive Tree Planner MPTree
Industrial Engineering Day, University of Trento, 2023
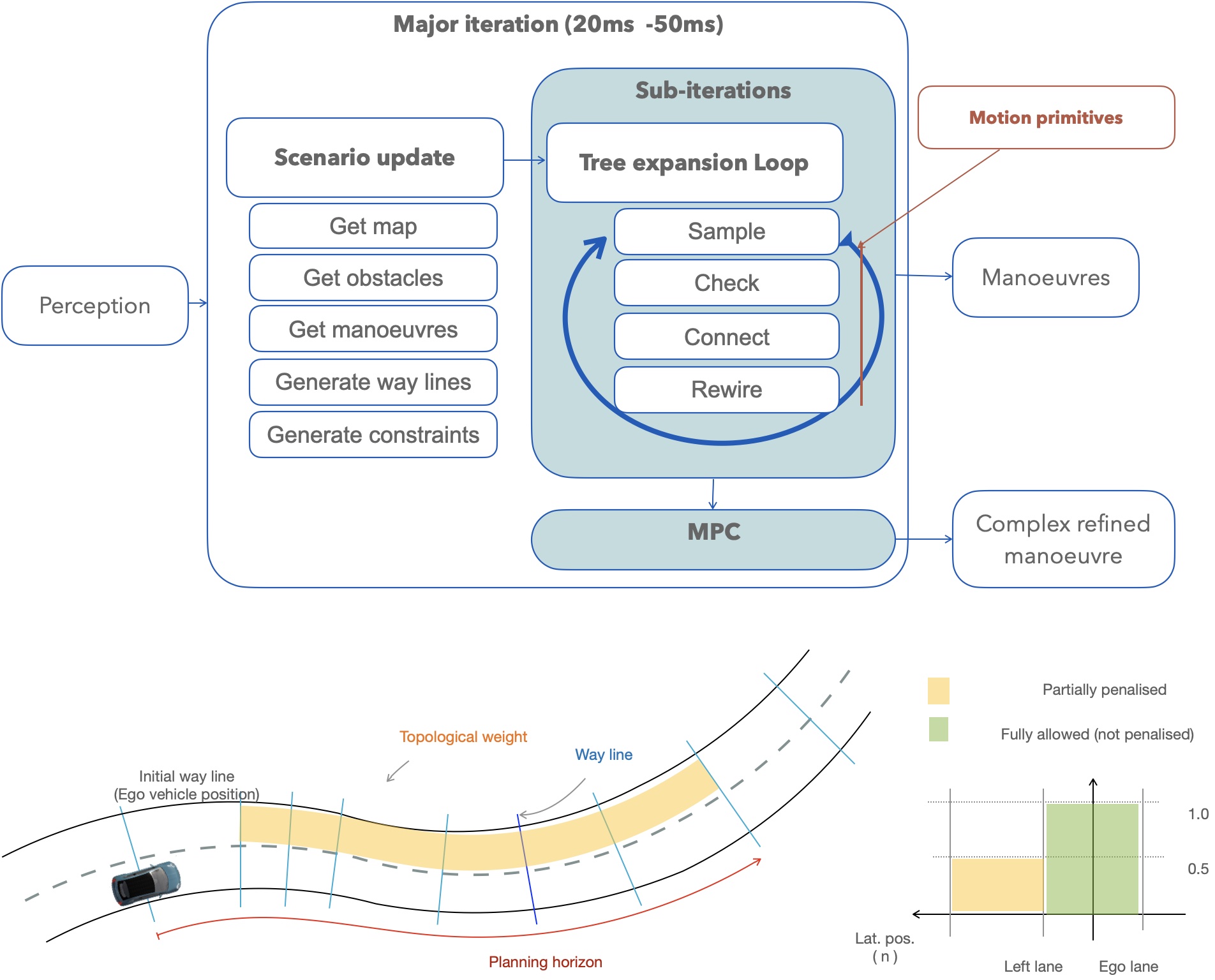
MPTREE: Motion primitive tree exploration for trajectory planning with dynamic obstacle avoidance
Industrial Engineering Day, University of Trento, 2022